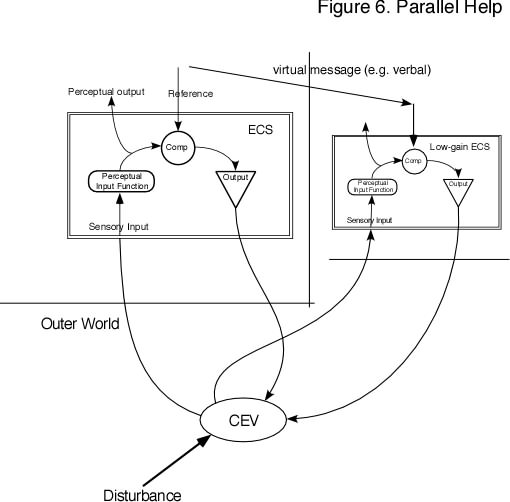
Figure 6 shows parallel control in which the helper is an autonomous
control system. Whereas in parallel slave control the helper receives its
reference signal directly as a user output signal, in parallel autonomous
control the helper derives the user's intended reference signal from other
user output such as verbal messages or by observation of the user's control
actions. The latter case might be illustrated by the helper saying: "I
can see you are trying to draw a straight line. Let me hold your hand to
help keep it straight."
The problem with parallel help is that each action by the helper is unpredictable by the user. It is a simple disturbance to the CEV, altering the user's perception of the CEV and the effective relation between the user's actions and changes in the CEV. This is a dynamic problem, in that if the helper control system has exactly the same reference level and dynamics as the user, the helper's actions will look exactly like those of the user, the effect being to simulate a higher gain in the user's control system and therefore more precise control. Such a match is never possible if either the helper or the user is human (or, indeed, alive).
Let us consider the effects of different mismatches between helper and user. Firstly, consider the case in which they are the same except that the helper's reference level for the CEV differs from that of the user. If the CEV is above both reference levels or below both reference levels, both helper and user are working in the same direction, and since the reference level is the only mismatch between them, helper and user cooperate. But if the CEV provides a perceptual signal between the two reference levels, the helper and user are in conflict, pulling in opposite directions. If the helper brings its error near zero, the user will experience error, and vice-versa. One sees this effect frequently in the fragmentation of victorious political revolutionary groups. Before the revolution, members of all the factions perceived the state to differ from their reference levels in much the same way. After the revolution succeeds, all factions find their errors much reduced, but now for some the error that remains is in a different direction from that of the members of other factions.
Parallel help can be effective when the user's percept is far from its reference level and the user is unable to reduce the error very effectively, for reasons of inadequate output gain or power. A parallel helper can be useful if it has a gain that is nonlinearly related to error, approaching zero as its error approaches zero. Such a helper aids the user in correcting large errors, but leaves the user alone to make the final adjustments. Otherwise it is not a helper, but a substitute actor.
Mismatched dynamics cause much greater problems in parallel control, and mismatch of dynamics is almost inevitable when either user or helper is a live organism rather than a designed machine. Unless the helper's actions precisely mimic those of the user, they constitute disturbances to the CEV from the viewpoint of the user. Not only that, but the fact that the helper is controlling makes the CEV "stiff." The CEV resists the user's actions, making it harder for the user to control the corresponding perception. Think of two people holding a tall pole, each trying very hard to hold the pole absolutely vertical. Each will find the othe to be fighting, perversely, since both have the same objective. Or, think of the complaint: "Please, I'd rather do it myself."
Parallel help is dangerous, and should normally be avoided in designing mechanical helper systems. The only viable solution to a situation in which parallel help is initially provided is for either the user or the helper to back off and cease attempting to control once the user's controlled perception is moderately close to its reference value (i.e. once the helper perceives the CEV to be moderately close to where the helper perceives the user to want it). Parallel help can be useful in the initial stages of bringing the CEV from a wildly erroneous place, but not for final control and maintenance of control against moderate disturbance.
<--Previous | Main | Next-->