All the foregoing approaches to helping were based on the idea that the "user" was a simple unitary control system whose single PIF created a CEV that was a simple scalar variable in the environment accessible to the helper. But users are not single simple control systems. At the very least they have a hierarchy of control systems, if Hierarchic Perceptual Control Theory is anywhere close to the truth. The perceptual signal controlled by a higher-level ECS is a function of signals controlled by more than one lower-level ECS. A helper can assist the user to control a higher-level perceptual signal by taking over control of one or more of the contributory lower-level ones. Of course, a helper cannot control a perceptual signal in the user, but the helper can control its own perceptual signal corresponding to a CEV perceived by the user.
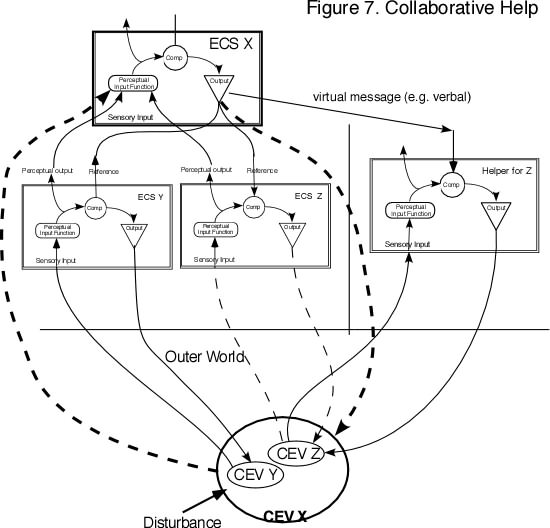
As an example, consider a case (shown in Figure 7) in which the user is trying to control X, the perception of a CEV "X", which is the difference between "Y" and "Z" (using quote marks to distinguish the CEVs from the corresponding perceptions, which are written without quotes).
Y and Z might be the perceived locations of an object and another object to which the first is to be affixed, so that X is to be made zero, regardless of precisely where the two objects might be. If the container is stationary, Z is stable, and the user can control X by controlling Y. But if Z is moving around (imagine it to be a springy piece of rubber rod on a shaky platform), the user may not be able to control Yfast enough to attain control of X. The reference for Y at any moment is influenced by the current error in X, which is determined by the fluctuations in both Y and Z.
Suppose a helper now could partially stabilize "Z", perhaps by holding the platform still. Then the user would find it much easier to control X by controlling Y. It would not matter exactly where the helper set "Z," because the user could compensate for any stable setting by providing an appropriate reference level for Y. The important aspect is that Z not change so fast that the X output could not compensate by way of controlling Y. The characteristic request for this kind of help might be: "Could you hold this thing still while I set the clamp, please."
The kind of help implied by this example might be called "parallel collaborative help." The user has a high-level reference that may or may not be known to the helper. The corresponding perceptual signal is a function of several lower-level perceptions, not all of which can be simultaneously controlled by the user, and which together cause the high-level perceptual signal (X in the example) to fluctuate more strongly or faster than the user can correct by acting on those components that can be controlled. If the helper can stabilize those components that the user cannot control, then the user may be able to control the high-level perception. Workers in a business can be considered parallel collaborative helpers of the owner-manager.
The value of parallel collaborative help depends on the existence of "spare" degrees of freedom among the components. Returning to the XYZ example, if the user has a reference level not only for the high-level perception X, but independently for the component variable Y, then any action on "Z" by the helper will have a disturbing effect much like that in the case of simple parallel help. Collaborative help works if the user and helper are not both trying to control the same perceptual variable at high gain. But the situation may be different if the user controls at low gain with a central dead zone a variable that the helper is controlling at high gain. This situation is that of a junior who helps a senior who is guiding the junior in how to provide the help. The senior wants primarily to control X, and can control Y, but not Y and Z at the same time. The junior could control Z, but only in a limited range. The senior assists when Z is far from the junior's reference, helping the junior to bring "Z" to a situation that the junior can handle. The senior helps the junior to help. Each helps the other, crossing variables.
Why should the senior who is capable of controlling both Y and Z need help? Ordinarily, this is a matter of resource limitation. The user has a limited number of action degrees of freedom, and may have other limits such as available energy or computational power. To control Y requires resources that cannot be devoted to the control of Z. If the helper relieves the user of the need to control Z precisely, more resources can be devoted to Y, even though the user may still use some for the partial control of Z. The user's assistance might, for example, be in the form of low-bandwidth monitoring and slow actions, leaving to the helper any high-bandwidth resistance to the disturbance.
<--Previous | Main | Next-->