3. Perceptual Control Introduction
4. Perceptual Control and imagination
5. Hierarchic Perceptual Control
9. Degress of Freedom in the individual
10. Degrees of Freedom in the organization
11 Modes of Perception (Reprise)
Four Modes of Perception
- Active control or tracking. Command action, or maintaining situation awareness by action in an internal (simulation) world.
- Searching: To see if something specific is actually out there, and if so, where.
- Exploring: In a non-threatening situation, finding new facts about the world's behaviour and its contents.
- Alerting: "Classical" Data Fusion, passively analyzing incoming data stream into "meaningful" objects and activities in the world.
There seem to be four fundamentally different modes of perception, depending on what the organism needs to do with the perceived information (M. M. Taylor, Perceptual Principles related to Remote Sensing, in D. White (Ed.), Resource Satellites and Remote Airborne Sensing for Canada, Feb. 1972, Ottawa: Dept. of Energy Mines and Resources). There is a "tracking" or "active control" mode, in which a perception is maintained at some reference value through the actions of the organism, or is being tracked (maintaining situation awareness) without active control. In "search" mode, the question is whether some particular thing or behaviour is part of the environment. Typically, the search is in support of active control, but is not part of it. In "exploration" mode, the point is to discover in a relatively safe way what is in the environment or how the environment reacts. Finally, "alerting" is a passive response to possibly significant events that might require active control to be initiated.
Commander's Two Control Loops
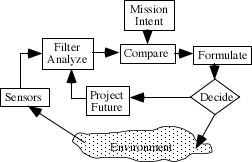
The commander attempts to bring his perception of the military situation into correspondence with his mission statement, which has been provided (in part) by the orders of a senior commander. The difference between the current situation and the mission intent must be brought close to zero, and to do this the commander must issue commands. But these commands must not be random. The commander tries out various possible commands in imagination, using the inner "imagination" loop in this figure, projecting the future consequences of any commands. He "plans." When the analyzed result conforms adequately to the mission intent, the commander can act in his own real environment—typically, by issuing commands to junior commanders. The evolution of the situation over time is reported by sensor systems and a data fusion process goes on, in which the commander's projected future is a substantial element. The "plan" can be amended continuously to bring the actual situation closer to the mission intent.